Разработка мульти-системного помехоустойчивого навигационного приемника с высокоточными координатно-временными определениями
Вопросы решаемые в процессе разработки помехоустойчивого навигационного приемника
Способность работать в условиях воздействия внешних радиопомех - одно из важнейших качеств помехоустойчивого приемника спутниковой навигации. Помехоустойчивость характеризуется предельно допустимым (наибольшим) значением отношения мощности помехового сигнала к мощности полезного сигнала Кп = РП /Рс, при котором система еще может решать целевую задачу (выполнять навигационно – временные определения) с заданными характеристиками.
Следует отметить, различные типы помех имеют различный механизм воздействия на навигационный приемник глобальной навигационной системы, что приводит к разным значениям коэффициента подавления Кп. Поэтому, говоря о конкретном значении коэффициента подавления, следует указывать для какого типа помехи оно приводится. Широкополосные помехи повышают уровень шума во всей полосе приема, что ведет к снижению отношения сигнал/шум. Узкополосные помехи опасны, если, находясь вблизи несущей частоты навигационного сигнала, проходят через схемы слежения (которые можно рассматривать как узкополосные фильтры). В таком случае, даже обладая небольшой мощностью, они приводят к неработоспособности НП ГНСС. Широкополосные, узкополосные и импульсные помехи могут перегружать входные каскады по мощности. Различные механизмы действия помех приводят к необходимости использования разных методов анализа воздействия помех, и средств борьбы с разными типами помех.
Наибольшую опасность представляют помехи, спектр которых находится в полосе частот навигационных спутниковых сигналов. Такие помехи воздействуют как на тракт цифровой обработки навигационного сигнала, так и непосредственно на тракт радиоприемного устройства.
Перед вхождением в режим слежения за сигналами НКА навигационный приемник должен пройти этап обнаружения сигналов навигационных космических аппаратов. Задачей этапа обнаружения (поиска) сигналов НКА является получение заключения о наличии в точке приема сигналов заданного набора НКА и формирование предварительной (грубой) оценки параметров этих сигналов. Таким образом, помехоустойчивость НП ГНСС необходимо обеспечивать в двух режимах работы: обнаружения и слежения за сигналами НКА.
Исходя из вышесказанного, помехоустойчивый навигационный приемник должен обеспечивать устойчивый прием навигационных сигналов ГНСС работая в помехозащищенных режимах при воздействии широкополосной помехи, мощность которой на входе антенного малошумящего усилителя в полосе полезного сигнала превышает мощность полезного сигнала более чем на 100 дБ и обеспечивать подавление помех с не менее чем шести направлений.
Принцип работы
При проектировании помехоустойчивого навигационного приемника учтены основные мировые и Российские достижения в этой области. Разрабатываемый навигационный приемник представляет собой помехоустойчивую аппаратуру потребителей, реализованную на основе семи элементной адаптивной антенной решетки. В разрабатываемом навигационном приемнике реализовано несколько методов и способов улучшения помехоустойчивости.
Основным является метод пространственно–временной обработки в котором минимизация влияния помех достигается путем управления диаграммой направленности (ДН) семиэлементной антенной решетки. Система управления такими антенными решетками, по сути, представляет собой адаптивный фильтр, настраивающийся по параметрам помехи. Формирование нулей диаграммы направленности (ДН) в направлении на помехи достигается, методом пространственно–временной обработки сигнала реализованного при помощи семи входового рекурсивного адаптивного фильтра по критерию наименьших квадратов на базе прямого QR–разложения.
В разрабатываемом навигационном приемнике применена предварительная цифровая обработка сигнала с целью минимизации фазо-частотных и амплитудно-частотных искажений радиочастотных трактов каналов адаптивной антенной решетки. В блоках предварительной цифровой обработки сигналов применена дополнительная фильтрация сигнала во временной области, которая позволяет значительно снизить внеполосные помехи и связанные с ними гармонические иинтермодуляционные помехи.
Алгоритм быстрого поиска по частоте реализован с использованием быстрого преобразования Фурье (БПФ) и позволяет значительно сократить время поиска навигационных сигналов по частоте.
МШУ
Требования к внутренним шумам радиотрактов, и в особенности к шумам МШУ помехоустойчивого навигационного приемника с адаптивными компенсаторами помех, значительно выше, чем к обычному навигационному приемнику.
Адаптивный метод подавления помех предусматривает пространственно–временную обработку сигнала в цифровом виде диаграммообразующей схемой. В диаграммообразующей схеме, в конечном итоге, складываются сигналы с n аналоговых каналов в том числе и шумы. В этом случае действующие в каналах приемника внутренние шумы со спектральными плотностями N аддитивно складываются, так как эти шумы слабо коррелированны и их воздействие равноценно воздействию одного эквивалентного шума со спектральной плотностью Nэ.
С учетом выше сказанного в помехоустойчивом навигационном приемнике применены балансные МШУ которые обладают расширенным динамическим диапазоном и низким коэффициентом шума вследствие отсутствия преселектора на входе МШУ.
Конвертеры
Техническая реализация адаптивных систем подавления помех наталкивается на ряд серьезных трудностей, связанных с жесткими требованиями к характеристикам функциональных узлов радиотрактов, возникающих при обработке сигналов в каналах, как в аналоговом, так и цифровом виде.
Рассмотрим влияние интенсивных помех различных типов на радиотракт. Теоретически идеальная гармоническая помеха в идеальном тракте навигационного приемника может привести к поражению полезного сигнала как максимум одного из каналов. На самом деле, помеха, скорее всего будет полосовой, а тракты усиления и преобразования РПУ не линейные. Реальная гармоническая помеха поступает на вход приемника с фазовыми шумами или вовсе модулированная, что приводит к эффективному расширению полосы помехи.
Тракт усиления и преобразования сигналов (конвертер), также не идеальный и описывается следующими параметрами, характеризующими нелинейность тракта: динамическим диапазоном по гармоническим искажениям HD2, HD3 и высших порядков; интермодуляционными искажениями IMD2, IMD3 и более высоких порядков, и мощностью блокирования характеризующейся точкой компрессии по одному децибелу IP1, а также коэффициентом шума. Все факторы, воздействующие вместе, могут привести к расширению спектра помехового сигнала вплоть до перекрытия всего диапазона полезного сигнала.
Исходя из выше сказанного, при определении параметров радиотрактов были учтены специфические особенности связанные с большой мощностью помехового сигнала (до минус 40...45 dBm) поступающего на вход МШУ радиотрактов.

АЦП
АЦП обеспечивает:
– входы/выходы – дифференциальные;
– обработку квадратурного сигнала;
– разрешение 16 разрядов;
– тактовая частота до 250 МГц;
– SFDR, не менее 90 дБs;
– SNR, не менее 70 дБs в первой зоне Найквиста;
– джитттер, не более 100 фс.
Блок опорных частот
Блок опорных частот (БОЧ) обеспечивает генерацию всех тактовых частот обеспечивающих работу конвертеров, АЦП, блока предварительной цифровой обработки сигнала, блока основной цифровой обработки сигнала. БОЧ имеет 14 выходов.
БОЧ обеспечивает синхронизацию всех каналов с возможностью подстройки времени запаздывания, обусловленного различными задержками сигнала в цепях конвертеров, АЦП, платы ПЛИС.
Генераторы тактовых частот обеспечивают выходную мощность, не менее 5 дБм.
Блоки цифровой обработки информации
Блок предварительной цифровой обработки сигнала
В разрабатываемом навигационном приемнике применена предварительная цифровая обработка сигнала с целью минимизации фазо-частотных и амплитудно-частотных искажений радиочастотных трактов каналов адаптивной антенной решетки. В блоках предварительной цифровой обработки сигналов, так же производится дополнительная фильтрация сигнала во временной области, которая позволяет значительно снизить внеполосные помехи и связанные с ними гармонические и интермодуляционные помехи.

Блок основной цифровой обработки сигнала
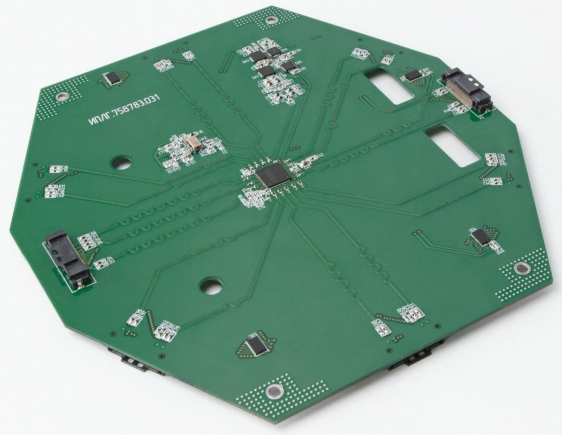
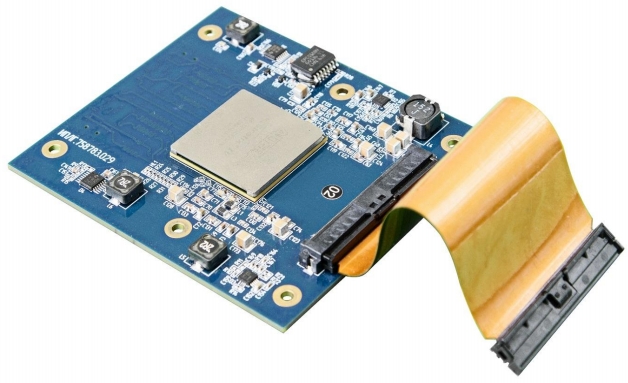
Блок основной цифровой обработки сигнала, включает в себя диаграммообразующую схему, модуль поиска сигнала навигационных систем ГЛОНАСС/GPS, модуль многоканального сопровождения сигналов навигационных систем ГЛОНАСС/GPS, модуль синхронизации шкалы времени. Выше перечисленные модули – самые важные части блока основной цифровой обработки и в основном определяют его характеристики.
Диаграммообразующая схема реализована на семивходовом RLS – алгоритме пространственной адаптивной фильтрации сигналов, основанном на прямом QR – разложении. Использование данного алгоритма обусловлено тем, что он обладает быстрой сходимостью и обеспечивает наименьшие значение остаточной ошибки в установившемся режиме по сравнению с другими адаптивными алгоритмами. Однако, данный алгоритм требует больших вычислительных ресурсов. Для снижения вычислительных затрат вычисление треугольного систолического массива выполнено при помощи вычислительных ячеек использующие алгоритм CORDIC, вместо вращений Гивенса. К тому же используемая архитектура обеспечивает значительное сокращение времени, требуемого для выполнения QR-разложения.
Алгоритм быстрого поиска по частоте реализован с использованием быстрого преобразования Фурье (БПФ) и позволяет значительно сократить время поиска навигационных сигналов по частоте.

Конструкция помехоустойчивого навигационного приемника
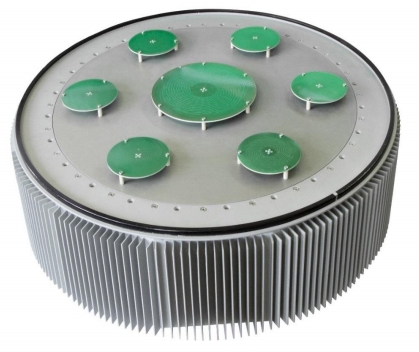
Конструкция помехоустойчивого навигационного приемника представляет собой двух корпусную систему, внутренний герметичный корпус и внешний брызгозащищенный корпус с оребрением закрытый с верхней стороны радиопрозрачным обтекателем (крышкой). Ребристый корпус выполняет роль радиатора.
Под радиопрозрачным обтекателем находится семиэлементная фазированная антенная решетка (отсек не герметичный, брызгозащищенный).
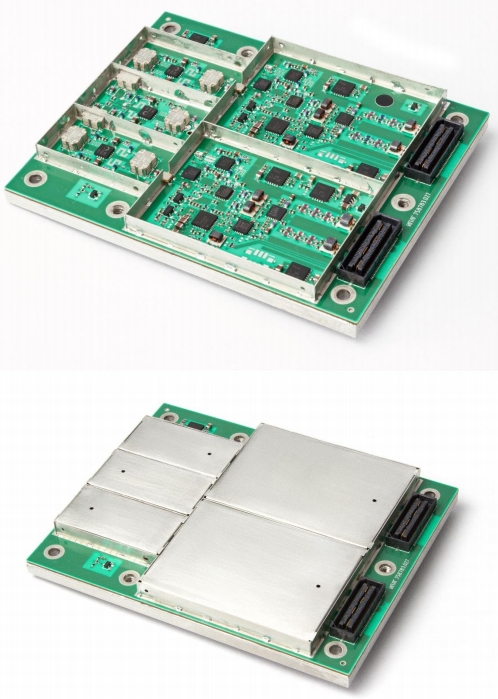
Все электронные модули и блоки размещены внутри герметичного отсека. В конструкции помехоустойчивого навигационного приемника применена компоновка модулей типа семиуровневый «сэндвич». Модули расположены друг над другом и электрически соединяются между собой, в основном посредством межплатных микроразъемов, или коротких шлейфов.
Отвод выделяемого тепла от электронных модулей осуществляется посредством шасси с малым тепловым сопротивлением. Выделяемое тепло сбрасывается сначала на боковую стенку герметичного отсека, а затем, при помощи тепловых трубок на внешний ребристый корпус.
